No laboratório de controle aplicado os alunos aprendem a controlar diversos tipos de sistemas com importantes aplicações práticas. Ver: http://sites.usp.br/lca/
Giroscópio
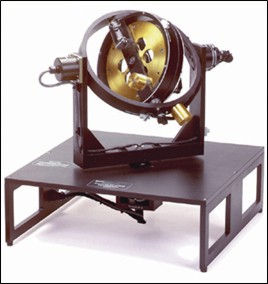
O CMG (Control Moment Gyroscope) do laboratório é um sistema mecânico rotativo com quatro graus de liberdade, cujo objetivo é controlar a posição angular dos corpos mais externos que não são atuados. Há dois motores CC que são os atuadores do sistema, localizados na roda de inércia e no anel mais interno. Sua principal aplicação é no controle de atitude de satélites e veículos espaciais. Um vídeo do sistema em funcionamento pode ser visto em: https://youtu.be/rFjk2HHTx14
Ball and Plate
O sistema possui dois servo-motores que proporcionam um movimento com dois graus de liberdade de uma plataforma. O objetivo deste sistema é manter equilibrada sobre a plataforma uma bolinha, cuja posição é detectada por meio de uma webcam, que por sua vez envia um sinal para um sistema de controle.

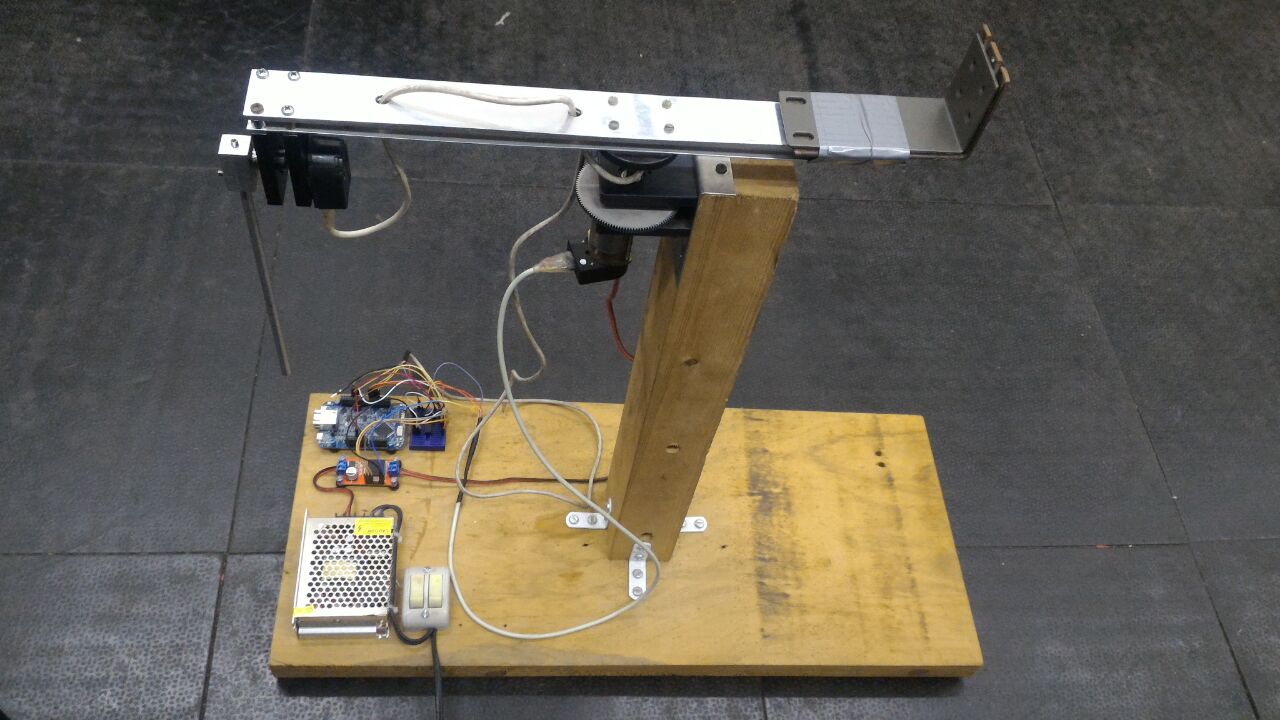
Ball and Wheel
O sistema possui uma roda acionada por um motor CC e uma bolinha que deve ser mantida equilibrada sobre a roda. A posição da bolinha é detectada por um sensor de distância que envia um sinal para um sistema de controle que por sua vez atua no motor. Um vídeo do sistema em funcionamento pode ser visto em:
https://youtu.be/BPn8gN1QOzE

Helicóptero com dois graus de liberdade
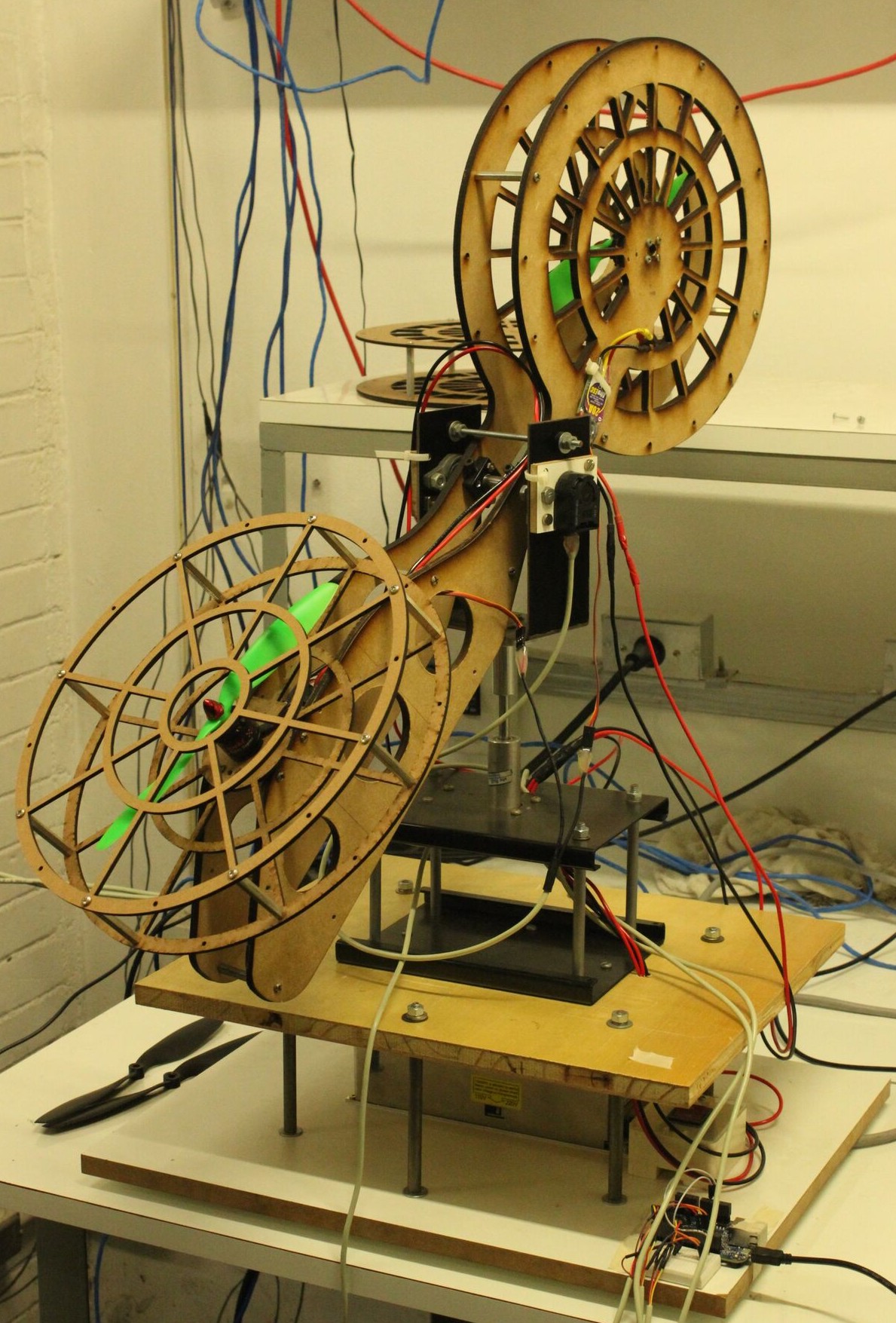
O objetivo deste sistema é estudar o funcionamento de um helicóptero com dois graus de liberdade, que são os ângulos de elevação (pitch) e guinada (yaw). O sistema possui duas hélices acionadas por motores sem escovas. Um vídeo do sistema em funcionamento pode ser visto em: https://youtu.be/E84x9rKRSSo
Levitador eletromagnético
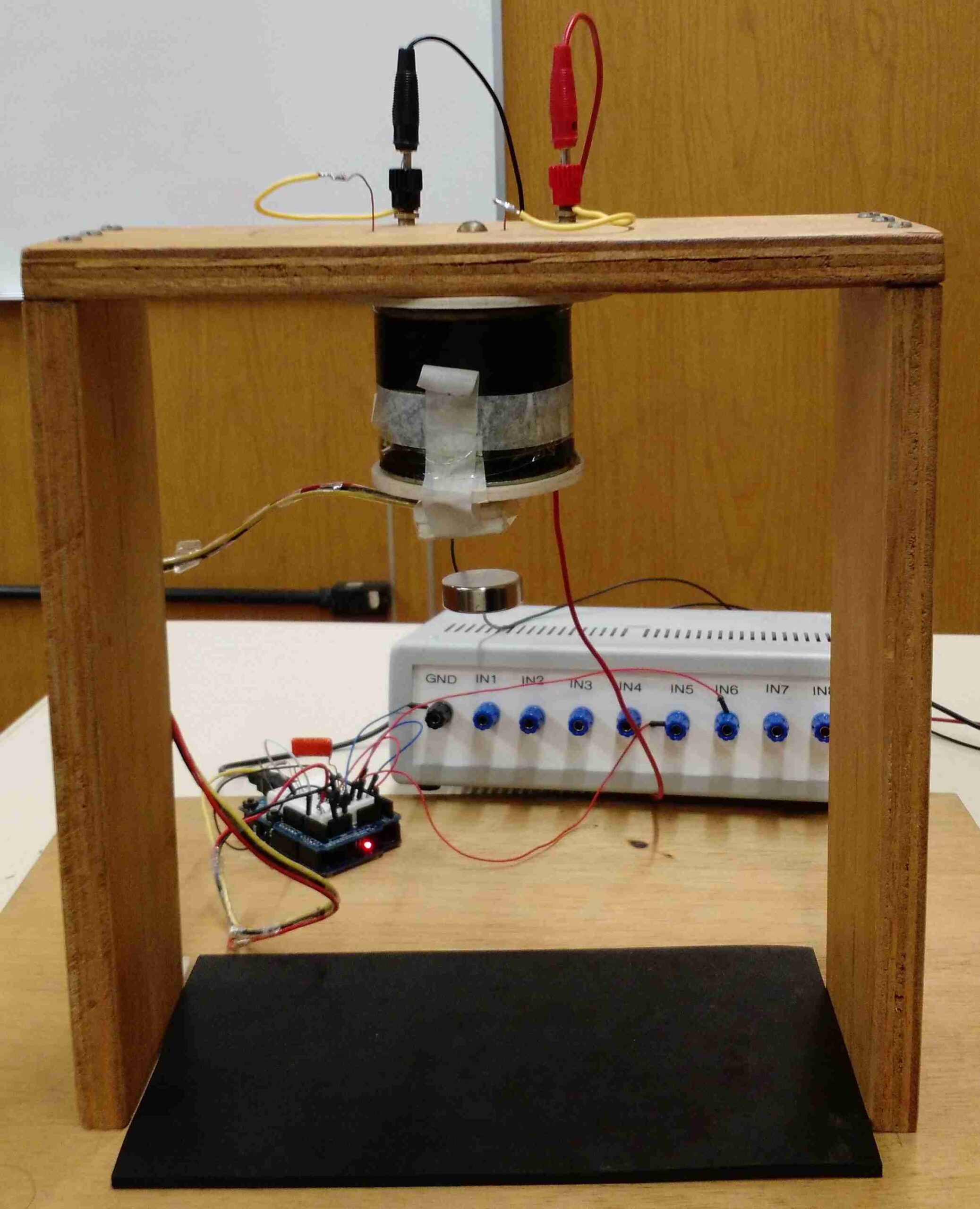
O levitador eletromagnético consiste em manter suspensa no ar e sem qualquer contato uma massa de material magnético. A corrente que circula pela bobina de um eletroímã produz uma força magnética que é capaz de suspender a massa. Controlando-se a distância do entreferro existente entre o eletroímã e a massa é possível conseguir com que esta flutue no ar. Este sistema possui aplicações na levitação de trens de alta velocidade e em centrífugas magnéticas de alta rotação.
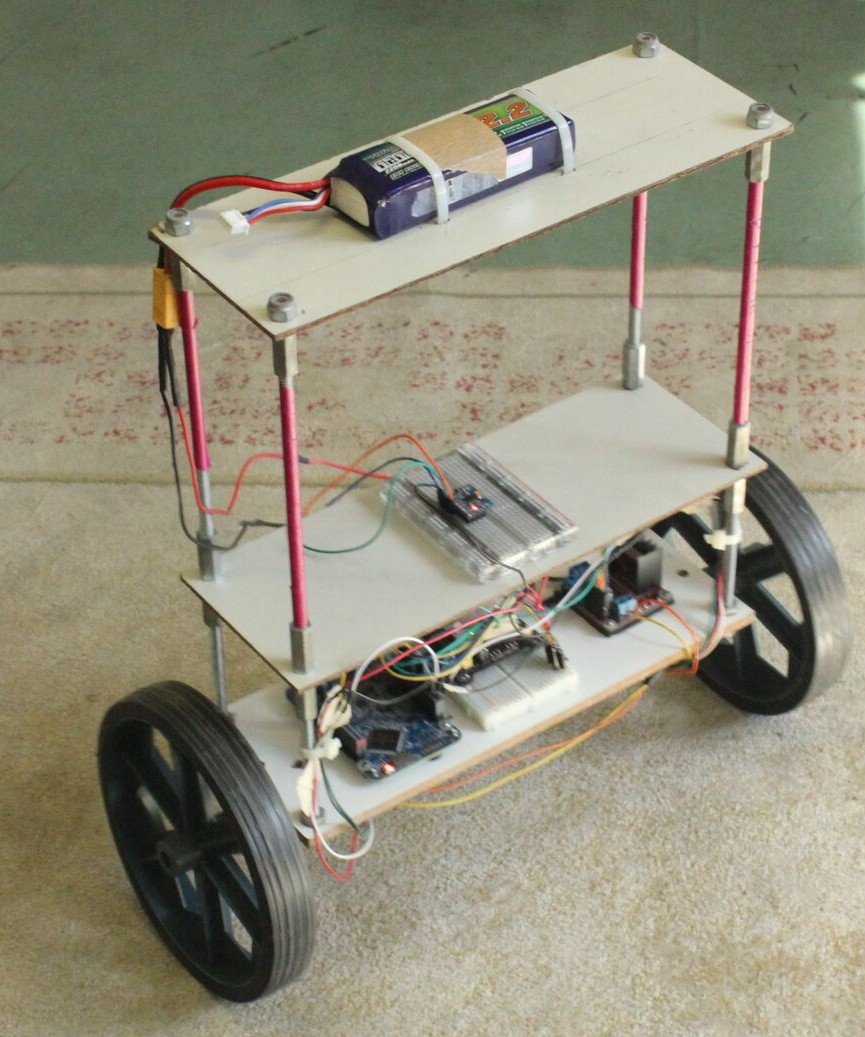
Mini-segway
O objetivo deste sistema é estudar o problema de controle existente no transporte de pessoas em duas rodas lado a lado. Monitorando a inclinação do dispositivo por meio de sensores e utilizando um sofisticado sistema de controle consegue-se equilibrar o mini-segway na vertical por meio de motores acoplados nas rodas. Um vídeo do sistema em funcionamento pode ser visto em: https://youtu.be/ghy1GtH-GGo
Monociclo auto-equilibrado
Totalmente desenvolvido no LCA, o sistema possui apenas uma roda para se mover em contato com o solo e uma roda de reação para compensar eventuais desequilíbrios laterias. O monociclo apresenta um grau de dificuldade elevado em termos de modelagem e controle. Um controlador LQR digital foi utilizado e o código é embarcado na plataforma de desenvolvimento NXP K64F. Link: https://youtu.be/t4sakACzcew
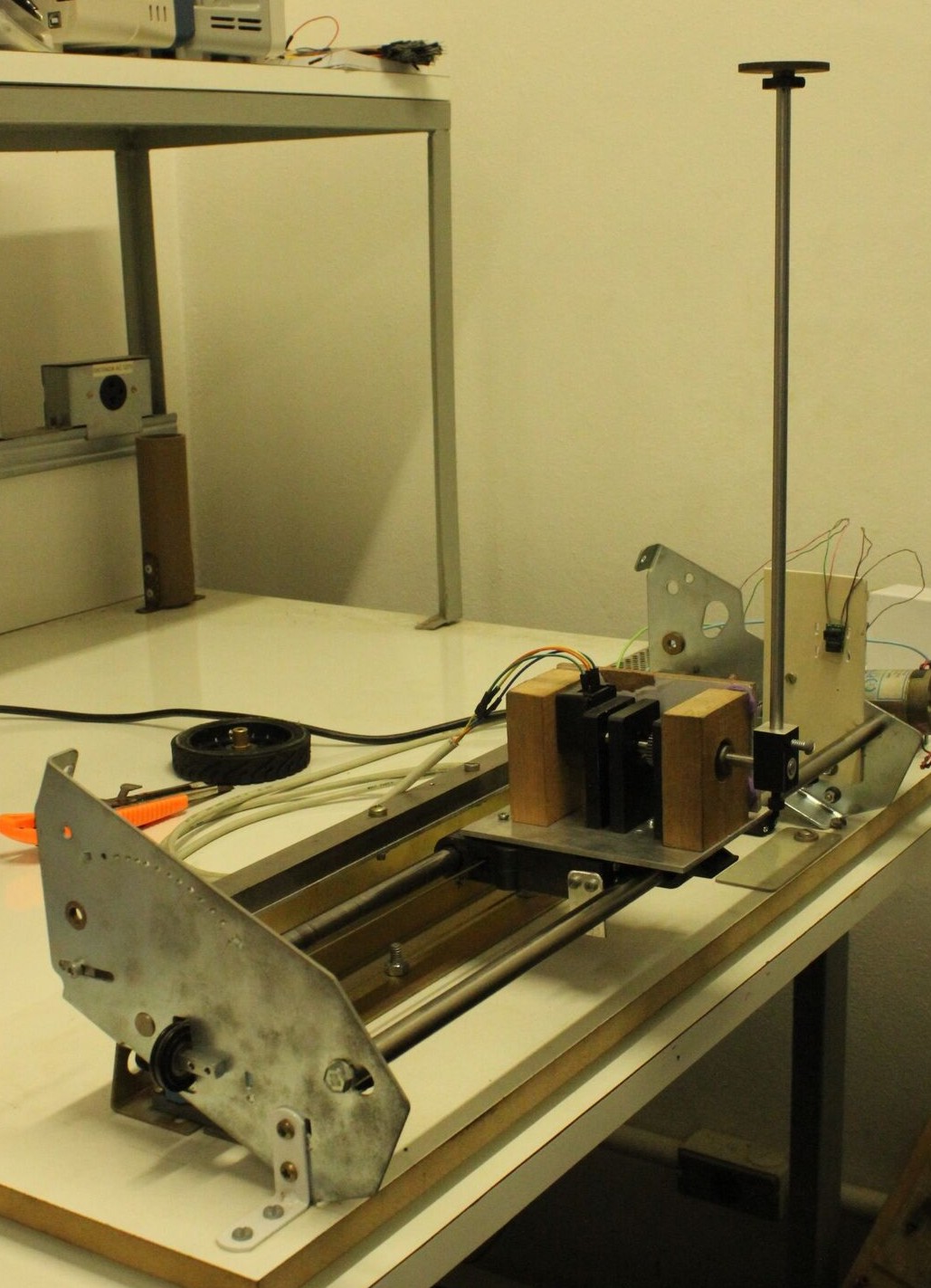
Pêndulo invertido
O pêndulo invertido consiste de uma haste que deve ser equilibrada na posição vertical. Isso é possível por meio do acionamento de um motor que movimenta um carrinho num trilho horizontal. Esse movimento é determinado por meio de um sofisticado sistema de controle que realiza cálculos a partir de medidas da posição angular da haste. Um vídeo do sistema em funcio-namento pode ser visto em: https://youtu.be/1svmVlx7UFw
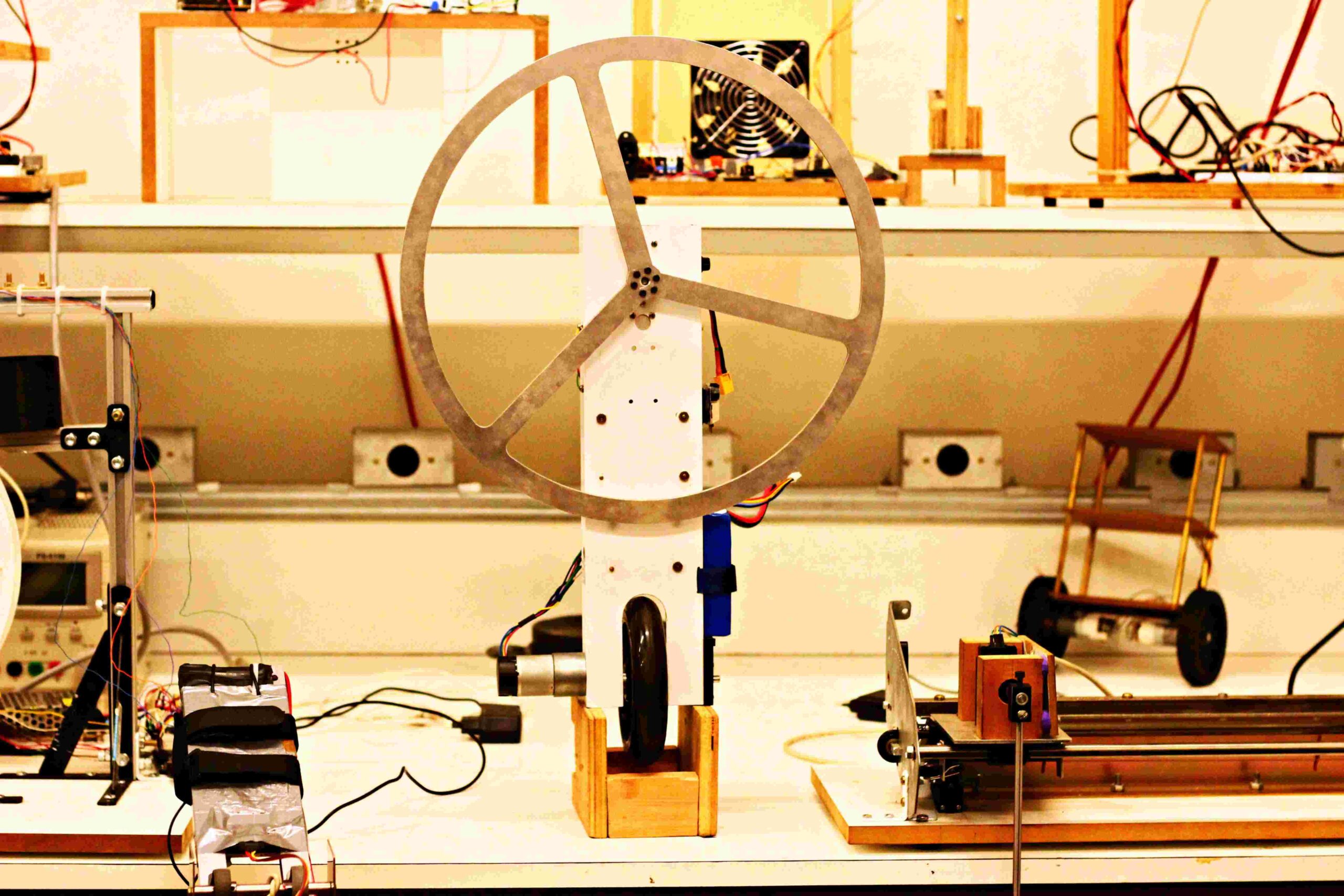
Pêndulo invertido com roda de reação
Possui como atuador uma roda de reação ligada a um motor de corrente contínua. O sistema de controle é dividido em duas partes. Inicialmente o sistema é levado ao seu ponto de equilíbrio (algoritmo de swing-up) e na vizinhança do ponto de equilíbrio o controle é chaveado para o modo estabilizante utilizando a técnica de controle LQR. Aplicações de sistemas com roda de reação incluem controle de atitude de satélites e veículos espaciais.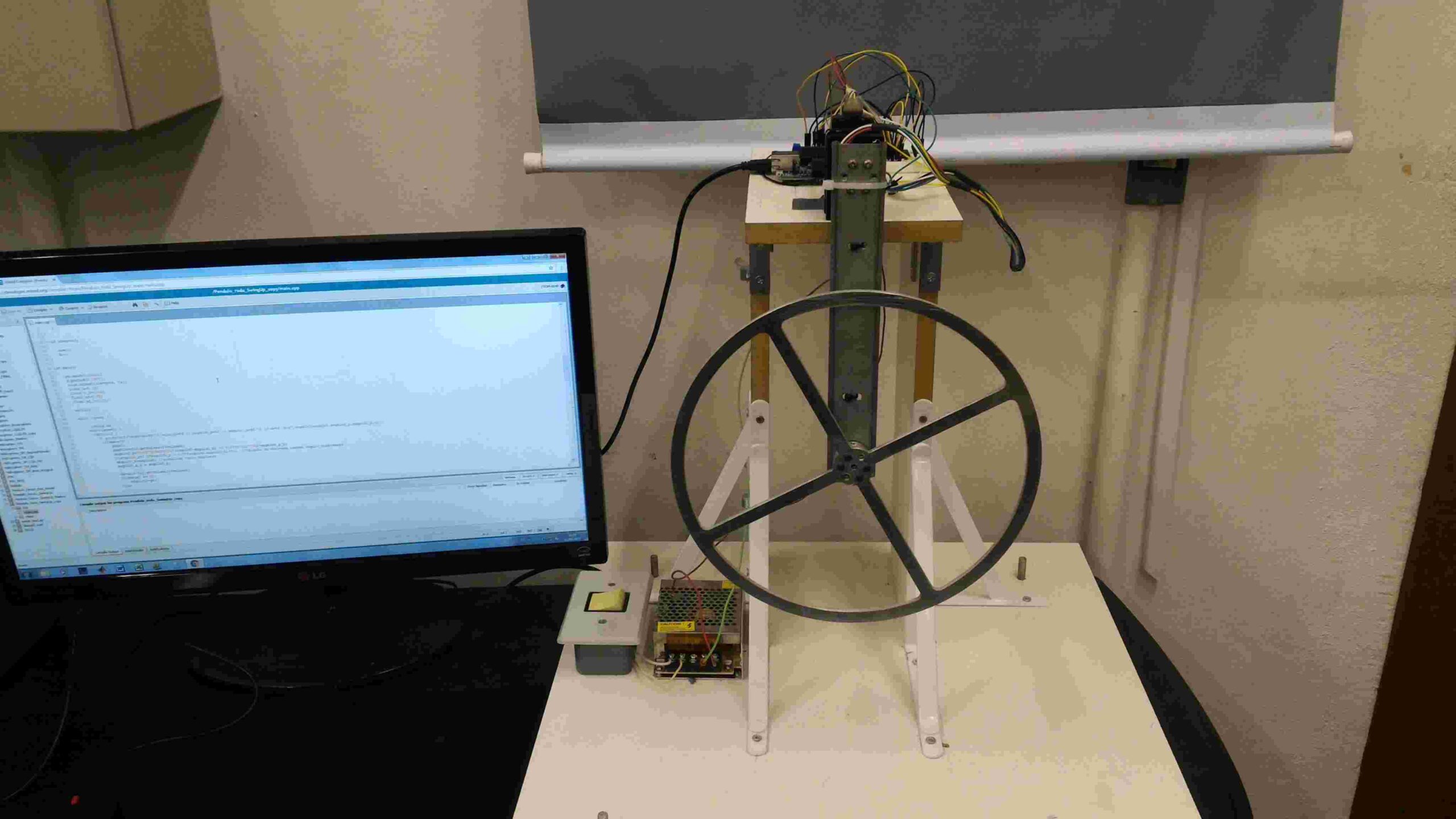
Pêndulo invertido rotacional
O pêndulo invertido rotacional, mais conhecido como Pêndulo de Furuta, é um sistema que possui apenas um atuador e dois graus de liberdade. O atuador presente neste sistema é um motor acoplado a um eixo comumente chamado de braço. Os dois graus de liberdade são o deslocamento angular do braço e o deslocamento angular de um pêndulo, que possui movimento rotacional livre. O objetivo do controle é a atuação do motor de tal forma que seu torque equilibre o pêndulo na posição invertida. Foi utilizada a plataforma de desenvolvimento FRDM-K64F da NXP para implementação de um controle digital LQR. Também implementou-se uma lógica de Swing-Up, que consiste numa série de comandos de torque que levem o pêndulo da posição de repouso para próximo da posição invertida.
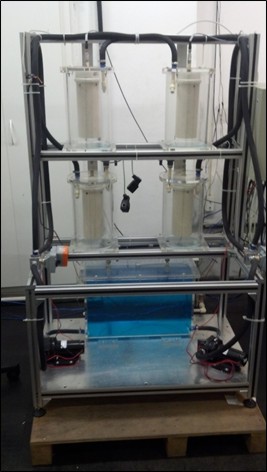
Sistema quádruplo de tanques
O sistema quádruplo de tanques é um processo multivariável, que possui 4 tanques acoplados e um reservatório, cujo objetivo é controlar o nível dos dois tanques inferiores. Devido ao acoplamento dos tanques torna-se necessário desenvolver projetos de sistemas de controle multivariáveis de forma a manter o nível na posição desejada pelo usuário. Um vídeo do sistema em funcionamento pode ser visto em: https://youtu.be/bVl3kvpXG3o