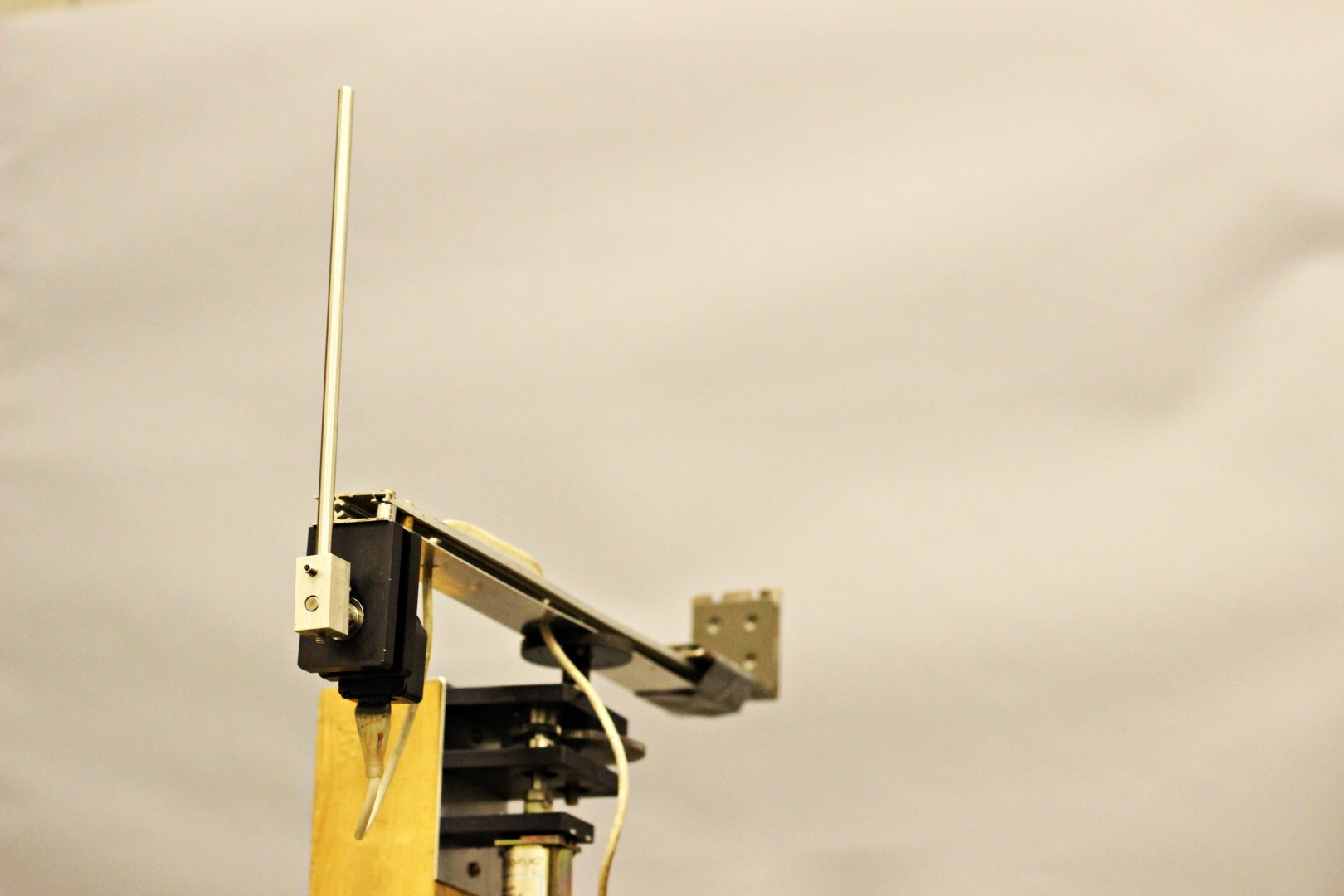
The inverted rotary pendulum, also known as Furuta Pendulum, is a classic example of control in which the system has only one actuator and two degrees of freedom. The actuator used in this system is a motor coupled to an axis commonly called as arm. The two degrees of freedom are the angular displacement of the arm and the angular displacement of a pendulum, which has free rotational movement.
The main objective of the control system is to drive the motor in such a way that its torque would balance the pendulum in inverted position. For the control loop programming, a NXP FRDM-K64F development platform was used to implement a LQR digital control. A Swing-Up logic was also implemented, which consists of a series of torque commands to bring the pendulum from its rest position to the inverted position.