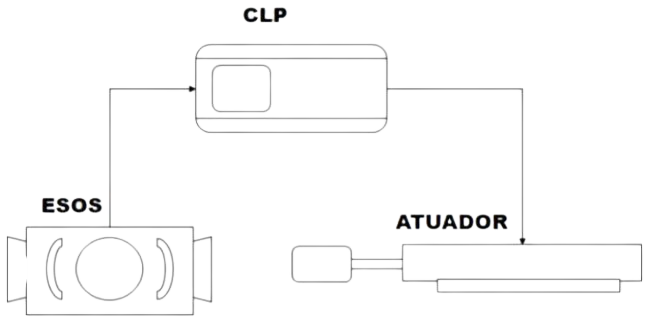
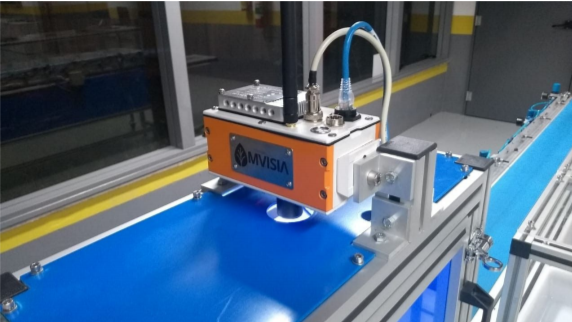
ESOS - Câmera de visão computacional
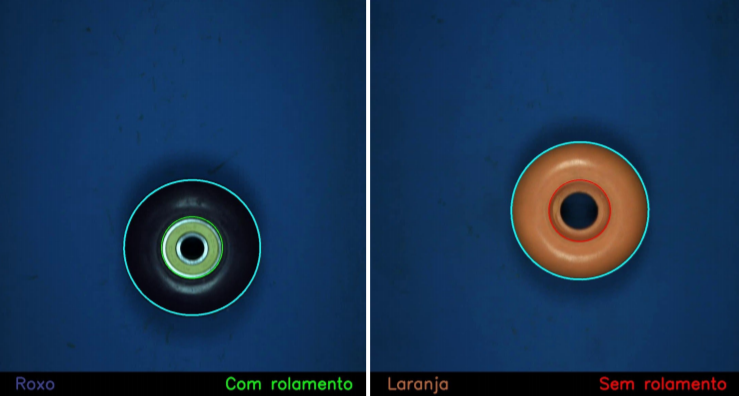
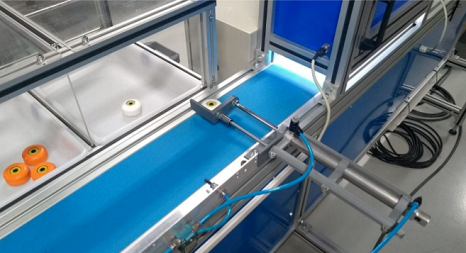
As rodinhas chegam na esteira e passam pela cabine de inspeção onde são "vistas" pela câmera de visão computacional que, por meio de um algoritmo de machine learning inserido em um banco de dados em nuvem, identifica as rodinhas de acordo com sua cor (branco, laranja, roxo, verde e verde-limão) e ainda verifica se a rodinha possui ou não rolamento.