
Autonomous Underwater Vehicle technology began its development at LVNT in 2008, with the first version of the AUV Pirajuba. In 2010, the second version was launched, with changes in onboard electronics and software as well as hull improvements. Tests with this version were carried out in Angra dos Reis in 2012 and 2013. Variations of this version were tested on the coast of Ubatuba in 2014 and 2015. An oceanographic version of the AUV incorporated physical-chemical and biological parameter sensors. Their integration with a plankton imaging system resulted in equipment for which a patent application was filed in 2017. In addition to applications in biological oceanography, the AUV has been used in maneuverability and navigation studies.
Currently, a hybrid AUV is being developed, aiming to meet the demand for a vehicle with a hydrodynamic profile and an umbilical cable management system that provides cruise performance compatible with both autonomous and teleoperated modes. The vehicle has a modular characteristic, with the hydrodynamic hull coinciding with the structural hull, with a maximum operating depth of 200m and a cruising speed between 3 and 4 knots. Its payload consists of an HD camera, dissolved oxygen sensors, and a heavy oil or CO2 detector. Its control system is implemented on a network of boards with STM32 family microcontrollers, developed by LVNT-USP, interconnected via a “CANOpen” communication protocol. Robust software design is based on the Misra-C procedure, which is verified by a tool from the Parasoft Inc.
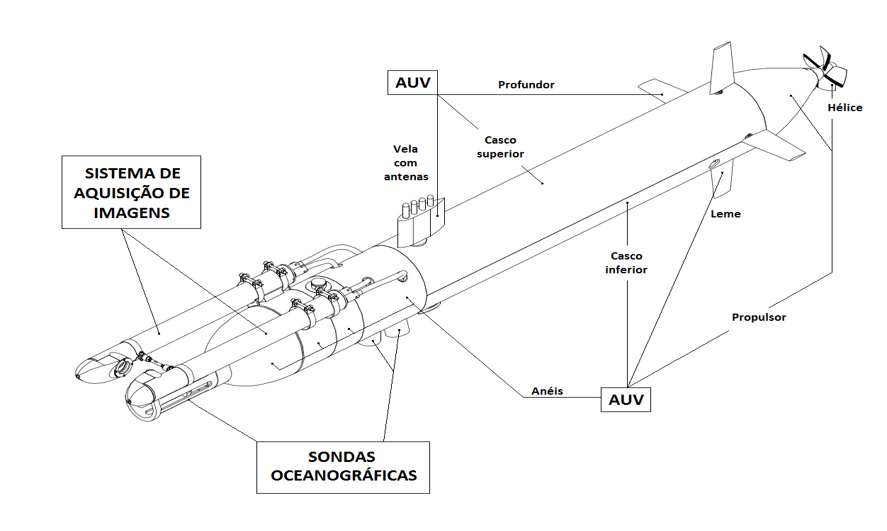
AUV PIRAJUBA PATENT
Alvarez, A. A.; Oliveira, L. M.; Vale, R. T. S.; Diana, R. E. Y.; Lopes, R. M.; Pellini, E. L.; Medeiros, M.; de Barros, E. A. Autonomous System for the Acquisition of Oceanographic Variables and Filming of Marine Plankton. 2017, Brazil. Patent: Innovation Privilege. Registration number: BR1020170128610, title: “Autonomous System for Acquiring Oceanographic Variables and Filming Marine Plankton,” Registration authority: INPI – National Institute of Industrial Property. Filing date: July 11, 2017