
Main Research Lines
- Navigation of Autonomous Underwater Vehicles
- Design of Unmanned Surface Vehicles
- Maneuverability and Dynamics Identification of Autonomous Underwater Vehicles
- Hydrodynamics of Autonomous Underwater Vehicles
- Control of Unmanned Underwater Vehicles
- AUVs: Oceanographic and Environmental Monitoring Applications
Ongoing Investigations
TITLE: CONTROL OF ROVs AND AUVs SUBJECT TO WAVE DISTURBANCES
Description: The study of depth and altitude control of AUVs and ROVs operating at shallow depths under the influence of wave disturbances is proposed, in order to perform missions of interest for environmental monitoring and activities pertinent to the offshore oil exploration industry. This study aligns with the continuation of an investigation recently resumed at the Unmanned Vehicle Laboratory (LVNT-USP), aiming mainly to meet an important demand from the offshore industry: the stable operation of inspection ROVs at shallow depths even when subject to wave disturbances.
Some Completed Projects
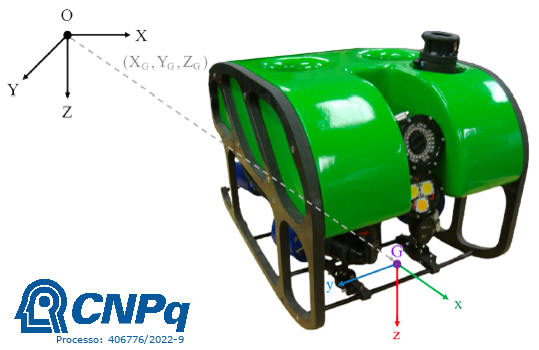
TITLE: ADAPTIVE SENSOR FUSION APPLIED TO AUV NAVIGATION
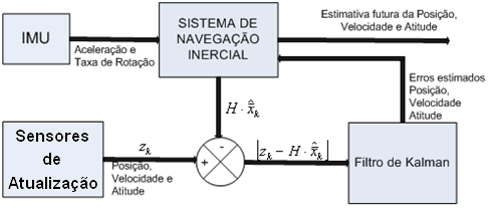
Description: This project addressed one of the main bottlenecks for improving AUV technology and establishing it as a protagonist in missions in the mentioned areas. This is the AUV navigation problem, i.e., estimating its location while submerged. Methods for alignment and initialization of the onboard navigation system, as well as real-time error compensation of its sensors, are being studied. In addition to constructing a methodology for approaching these tasks, the investigation of applying adaptive sensor fusion using the Kalman Filter is proposed.
As one of the results, the project produced a surface test platform, which can also be used in oceanographic and environmental monitoring missions. This is an unmanned surface vehicle (USV).
TITLE: NETUNO, RESEARCH, DEVELOPMENT AND INNOVATION NETWORK IN UNDERWATER COMPUTING, INSTRUMENTATION, AUTOMATION AND ROBOTICS
Description: The project aimed to foster research and development in underwater computing, instrumentation, automation, and robotics, aiming at human resource training in these areas. Besides courses and workshops, the project also included equipment development, particularly an autonomous underwater vehicle, for applications in the oceanographic area. On this latter topic, the project produced an autonomous system for plankton detection and filming, which was patented.
Principal Researchers: Ettore Apolonio de Barros (EPUSP), Rubens Lopes (IOUSP) – Coordinator, Silvia Silva da Costa Botelho (FURG), Paulo Drews (FURG)
Funder: Coordination for the Improvement of Higher Education Personnel – Financial Aid. Duration: 2014-2019
TITLE: DETECTION OF THIN LAYERS BY AN AUTONOMOUS UNDERWATER VEHICLE IN A COASTAL ECOSYSTEM
Description: Thin layers are oceanographic features formed by high concentrations of particulate matter and planktonic organisms retained in aggregations with small vertical thickness. These structures are areas of intense biogeochemical activity in stratified oceans, but no studies exist on their occurrence and persistence in coastal ecosystems of the southern hemisphere. Thin layers are difficult to detect using traditional sampling techniques. In this project, sensors were used to evaluate physical-chemical and bio-optical properties relevant for detecting these layers. The sensors were housed in an Autonomous Underwater Vehicle (AUV), the AUV Pirajuba, developed with national technology by LVNT-USP. The AUV Pirajuba conducted missions monthly in the Ubatuba region, on the northern coast of São Paulo. Transects perpendicular to the coast were performed, during which the AUV undulated from the surface of the water column down to near the seabed, at a speed compatible with recording oceanographic properties at scales relevant for documenting thin layers. A submersible holographic camera coupled to the bow of the AUV Pirajuba collected high-resolution images of organisms associated with the thin layers.
Main Researchers: Ettore Apolonio de Barros (EPUSP) – Coordinator / Rubens Mendes Lopes (IOUSP) – Eduardo Lorenzetti Pellini (EPUSP).
Funder: São Paulo Research Foundation – Financial Aid. Duration: 2014-2016.
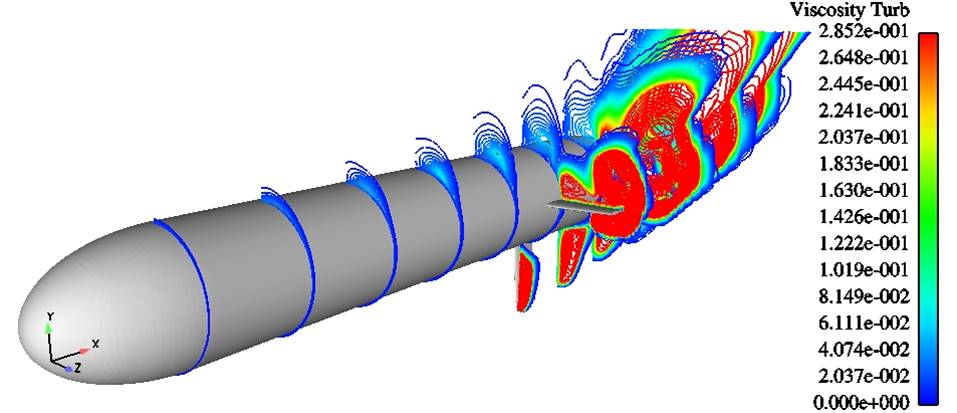
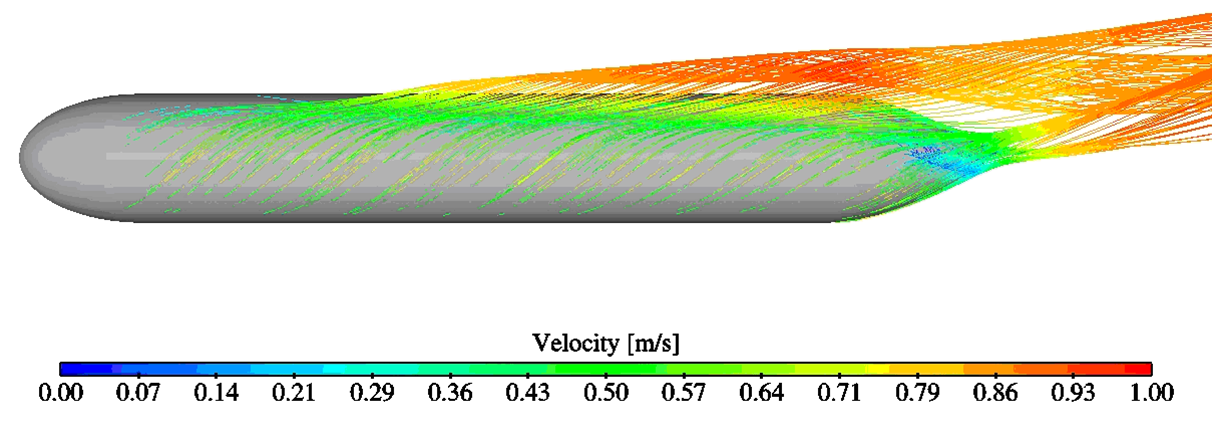
TITLE: NUMERICAL INVESTIGATION OF HYDRODYNAMIC FORCES ON AUTONOMOUS UNDERWATER VEHICLES
Description: This research project aims to conduct a study in the areas of hydrodynamic modeling and geometric parameter optimization of Autonomous Underwater Vehicles (AUVs), based on Computational Fluid Dynamics (CFD) techniques. This proposition falls within a research context in the area of AUV maneuverability that has characterized the research activities of the Unmanned Vehicle Laboratory (LVNT) at the University of São Paulo. In particular, the proposed research plan represents a continuation of the investigations into estimating hydrodynamic forces carried out in the project “Development of Low-Cost Autonomous Vehicles”, funded by FAPESP (process no. 07/56646-5). Deriving methodologies for estimating hydrodynamic forces from the geometric characteristics of vehicles has, as one of its applications, shape optimization aimed at better performance and increased vehicle autonomy. In the case of AUVs, also due to the lack of established methodologies, there are few works that explore the estimation of hydrodynamic parameters in optimizing vehicle maneuvering performance. Therefore, another area that could benefit from the proposed research is identified. In this project, the focus is on estimating static lift forces (varying the angle of attack in the absence of angular velocities), dynamic forces (originating from rotational movements of the vehicle), added mass forces, and viscous drag forces. Static and viscous drag forces are being validated through tests with hydroplanes and a captive model in a test tank. The dynamic derivatives will have their estimates verified according to the response of the AUV Pirajuba, which is being developed at LVNT, in self-propelled trials. In particular, the development of the AUV Pirajuba is also a highlight of this project.
Principal Investigators: Ettore Apolônio de Barros (EPUSP), João Lucas Dozzi Dantas (EPUSP).
Funder: FAPESP – Financial Support. Duration: 2009-2011
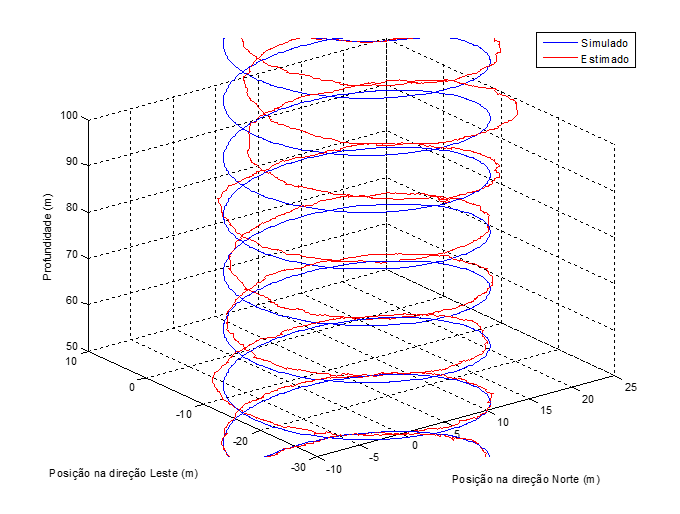
Trajectory Estimation: Simulation Results
TITLE: Diverless Teleoperated Robotic System for Inspection, Cleaning, Maintenance, and Intervention on Mooring Lines
Description: The main objective of this project is the development of a technology and its associated infrastructure for measuring the chain links of mooring lines on floating production units. The development of the robotic system is planned, building upon solutions already proposed by the team. The prototype of the robotic system to be developed will be initially tested in a laboratory environment, followed by evaluations in sheltered marine waters, and finally modified to become a field prototype. This latter prototype, after being tested in sheltered waters, will be subject to validation and adjustments during and after the final testing phase in the offshore working environment. Finally, the project includes the investigation of a dedicated propulsion/maneuvering system, as well as the extension of the robotic system to additional tasks related to the maintenance and repair of the mooring line.
