
Electronic Modules
The electronic modules developed at LVNT are boards dedicated to specific functions that make up the control architecture of unmanned vehicles. They concentrate circuits and interfaces responsible for tasks such as navigation and communication, allowing each vehicle subsystem to be handled in a modular way. This approach also supports standardization, the reuse of components in different projects, and the continuous evolution of the hardware.
Optical Communication System for Underwater Applications (2022)
This is a unidirectional prototype that uses high-power LEDs and a high-gain silicon photomultiplier to establish communication with a bandwidth of approximately 2.4 Mbps over distances of a few meters. It has a TCP/IP-compatible Ethernet interface for sending and receiving data through the transmitting and receiving units.

Optical Communication System for Underwater Applications
Electronic Telemetry Module (2020)
This board is mainly intended for communication between the vehicle and the command station. Its main component is an RF modem operating in the 900 MHz band, with a transmission rate of up to 276 kbps and a range of up to 60 km when using a high-gain antenna and operating without obstacles. As additional resources, it includes a GNSS receiver for vehicle geolocation, a GSM/GPRS module for long-distance data transmission within cellular network coverage, and a microSD card slot for data storage. All these modules are connected through UART communication buses to an ARM-core microcontroller, which can be programmed according to the user’s needs. Communication with other boards can be performed through two independent CAN buses.

Electronic Telemetry Module
Electronic Battery Management Module (2020)
The BMS board is responsible for conditioning the battery packs, managing the energy supplied by them, and ensuring protection against overload and short circuits. The board has independent inputs for up to four battery packs, a Hall-effect current sensor, a voltage sensor, a temperature sensor, and semiconductor switches that allow each pack to be turned on and off independently. The entire management of the BMS board is performed by an ARM-core microcontroller. The board also has a CAN communication bus that enables communication with other boards within a system.

Electronic Battery Management Module
Navigation Module (2020)
The navigation board is the main element for acquiring sensor data and running navigation algorithms, with an ARM-core microcontroller as its main component. It has five RS232 communication buses, one RS485 communication bus, two CAN communication buses, four digital outputs with voltage-level selection between 5 V and 12 V, two 5 V-tolerant digital inputs, a temperature sensor, four user-programmable LEDs, five analog inputs with 12-bit resolution, and one analog output (DAC) with 12-bit resolution.
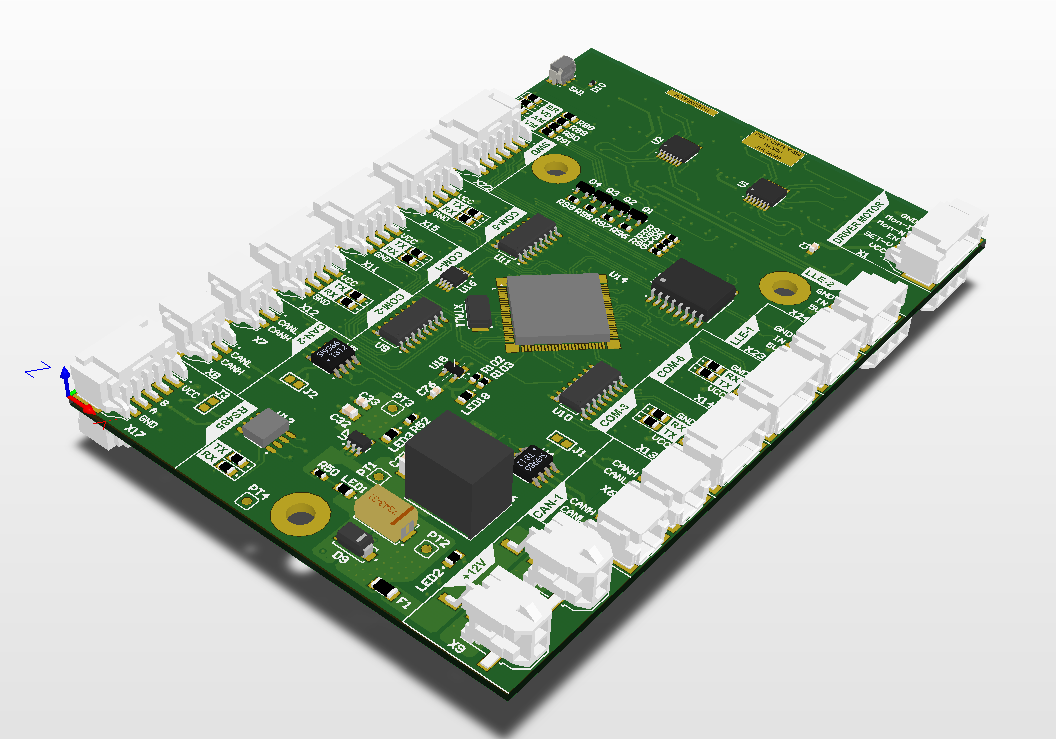
Navigation Module
Electronic Data Storage Module (2017)
The datalogger board is mainly intended for storing large volumes of data from sensors and navigation algorithms. It has an Ethernet interface and an integrated FTP server for exchanging data between the vehicle and an external computer. Data storage is performed on an SD card installed on the board. As additional resources, it has two RS232 communication buses, two CAN communication buses, four user-programmable LEDs, and a temperature sensor.

Electronic Data Storage Module
Control Module for Unmanned Vehicles (2017)
This board is used for general purposes and can be employed for navigation, data storage, sensor reading, and other tasks. It has three RS232 communication buses, one RS485 communication bus, two CAN communication buses, one I2C communication bus, one USB OTG port, eight digital outputs with selectable voltage levels between 5 V and 12 V, four optocoupled digital inputs, four analog inputs with 12-bit resolution, two analog outputs (DAC) with 12-bit resolution, and an Ethernet interface.
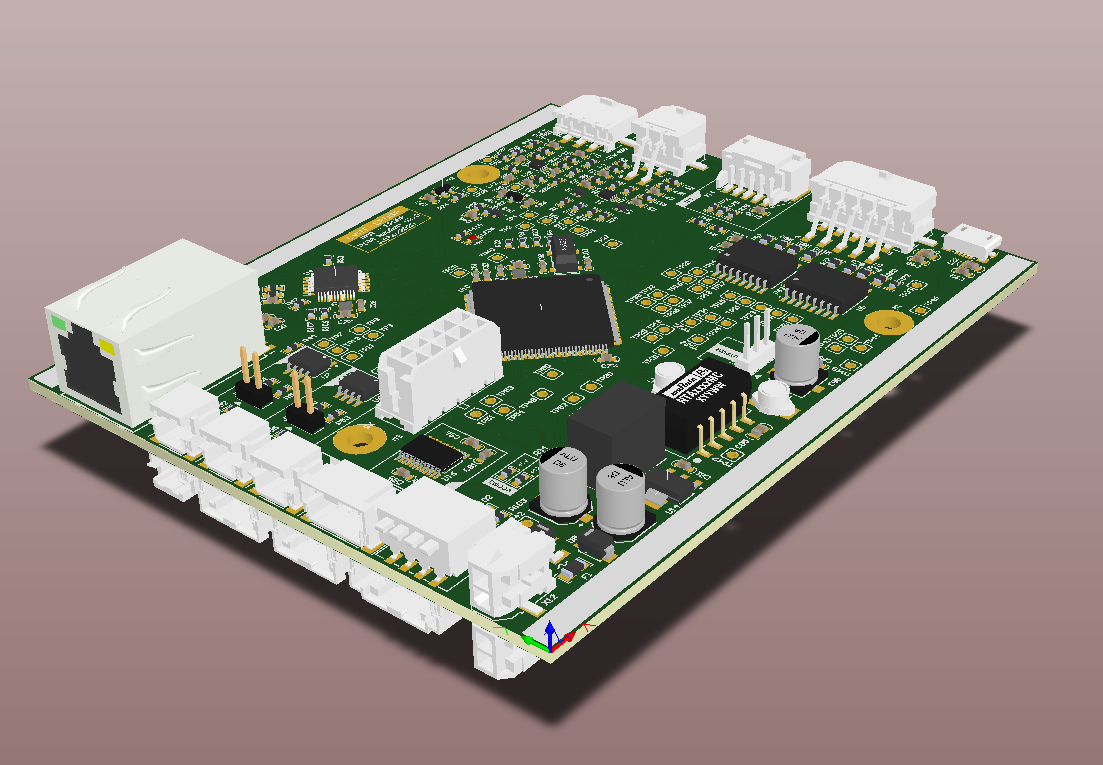
Control Module for Unmanned Vehicles