Principais Linhas de Pesquisa
- Navegação de Veículos Autônomos Submarinos
- Projeto de Veículos Aquáticos Não Tripulados
- Manobrabilidade e Identificação da Dinâmica de Veículos Autônomos Submarinos
- Hidrodinâmica de Veículos Autônomos Submarinos
- Controle de Veículos Submarinos Não Tripulados
- AUVs: Aplicações Oceanográficas e de Monitoramento Ambiental
Investigações em Andamento
TÍTULO: CONTROLE DE ROVs e AUVs SUJEITOS A PERTURBAÇÕES DE ONDAS
Descrição: Propõe-se o estudo do controle de profundidade e altitudede AUVs e ROVs, operando a baixa profundidade sob influência das perturbações de ondas, de modo a desempenhar missões de interesse do monitoramento ambiental e das atividades pertinentes à indústria de exploração de óleo offshore. Tal estudo vem de encontro à continuidade de uma investigação, recentemente, retomada no Laboratório de Veículos Não Tripulados (LVNT-USP),visando, principalmente, atender a uma demanda importante da indústria offshore que é a operação estável de ROVs de inspeção a baixa profundidade mesmo quando sujeitos a perturbações de ondas.
Alguns Projetos Realizados
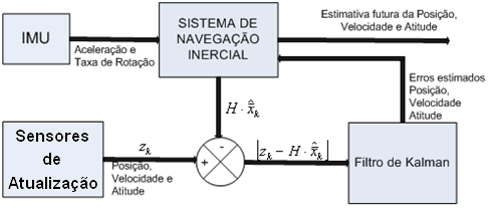
TÍTULO: FUSÃO SENSORIAL ADAPTATIVA APLICADA À NAVEGAÇÃO DE AUVS
Descrição: Este projeto abordou um dos principais gargalos para o aperfeiçoamento da tecnologia de AUVs e para o seu estabelecimento como protagonista em missões nas áreas mencionadas. Trata-se do problema de navegação do AUV, ou seja, da estimativa da sua localização enquanto submerso. Estão sendo estudados métodos de alinhamento e inicialização do sistema de navegação embarcado, bem como a compensação de erros dos seus sensores em tempo-real. Além da construção de uma metodologia para a abordagem dessas tarefas, propõe-se a investigação da aplicação da fusão sensorial adaptativa utilizando o Filtro de Kalman.
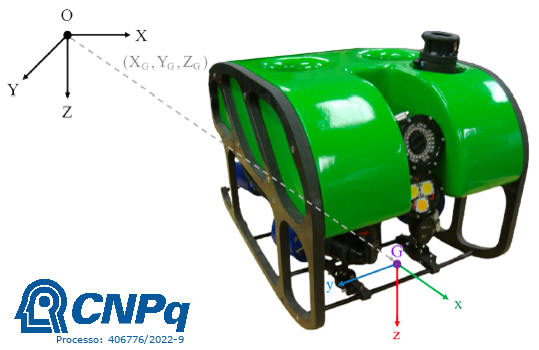
Como um dos resultados, o projeto produziu uma plataforma de testes de superfície, que também poderá ser empregada em missões oceanográficas e de monitoramento ambiental. Trata-se de um veículo de aquático não tripulado de superfície (USV).
TÍTULO: NETUNO, REDE DE PESQUISA, DESENVOLVIMENTO E INOVAÇÃO EM COMPUTAÇÃO, INSTRUMENTAÇÃO, AUTOMAÇÃO E ROBÓTICA SUBAQUÁTICAS
Descrição: O projeto visou fomentar a pesquisa e desenvolvimento em computação, instrumentação automação e robótica subaquáticas visando a formação de recursos humanos nestas áreas. Além de cursos e workshops, o projeto inclui também o desenvolvimento de equipamentos, em particular, um veículo autônomo submarino, para aplicações na área oceanográfica. Neste último tópico, o projeto produziu um sistema autônomo para a detecção e filmagem de plâncton que foi patenteado.
Principais Pesquisadores: Ettore Apolonio de Barros (EPUSP) , Rubens Lopes (IOUSP)- Coordenador, Silvia Silva da Costa Botelho (FURG)- Paulo Drews (FURG)
Financiador(es): Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - Auxílio financeiro . Vigência: 2014-2019
TÍTULO: DETECÇÃO DE CAMADAS FINAS POR VEÍCULO AUTÔNOMO SUBMERSÍVEL EM UM ECOSSISTEMA COSTEIRO
Descrição: Camadas finas são feições oceanográficas formadas por altas concentrações de material particulado e organismos planctônicos retidas em agregações com pequena espessura vertical. Essas estruturas são áreas de intensa atividade biogeoquímica em oceanos estratificados, mas não existem estudos sobre sua ocorrência e persistência em ecossistemas costeiros do hemisfério sul. As camadas finas são de difícil detecção por técnicas tradicionais de amostragem. Neste projeto, foram utilizados sensores para a avaliação de propriedades físico-químicas e bio-ópticas relevantes para a detecção destas camadas. Os sensores foram alojados em um Veículo Subaquático Autônomo (Autonomous Underwater Vehicle, AUV), o AUV Pirajuba, desenvolvido com tecnologia nacional pelo LVNT-USP. O AUV Pirajuba executou missões com frequência mensal na região de Ubatuba, litoral norte de São Paulo. Foram realizadas transecções perpendiculares à costa, nas quais o AUV ondulará desde a superfície da coluna de água até próximo do assoalho marinho, em velocidade compatível para o registro das propriedades oceanográficas nas escalas relevantes para o registro de camadas finas. Uma câmera holográfica submersível acoplada à proa do AUV Pirajuba coletou imagens de alta resolução dos organismos associados às camadas finas.
Principais Pesquisadores: Ettore Apolonio de Barros (EPUSP) - Coordenador / Rubens Mendes Lopes (IOUSP) – Eduardo Lorenzetti Pellini (EPUSP).
Financiador: Fundação de Amparo à Pesquisa do Estado de São Paulo - Auxílio financeiro. Vigência: 2014-2016.
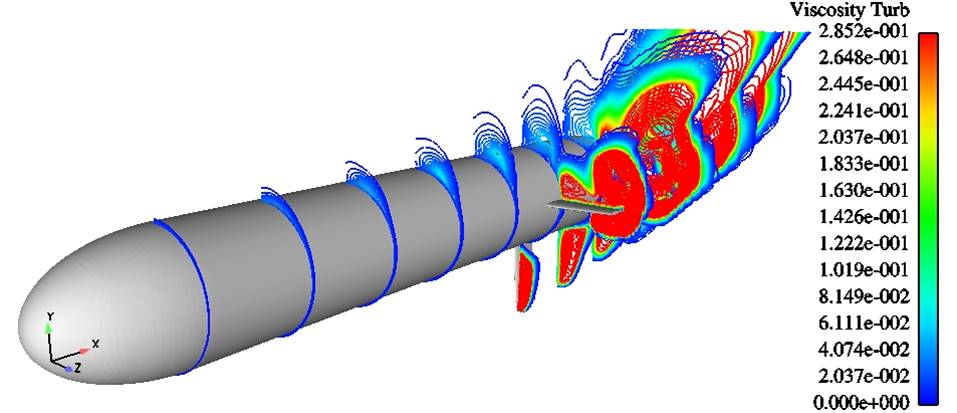
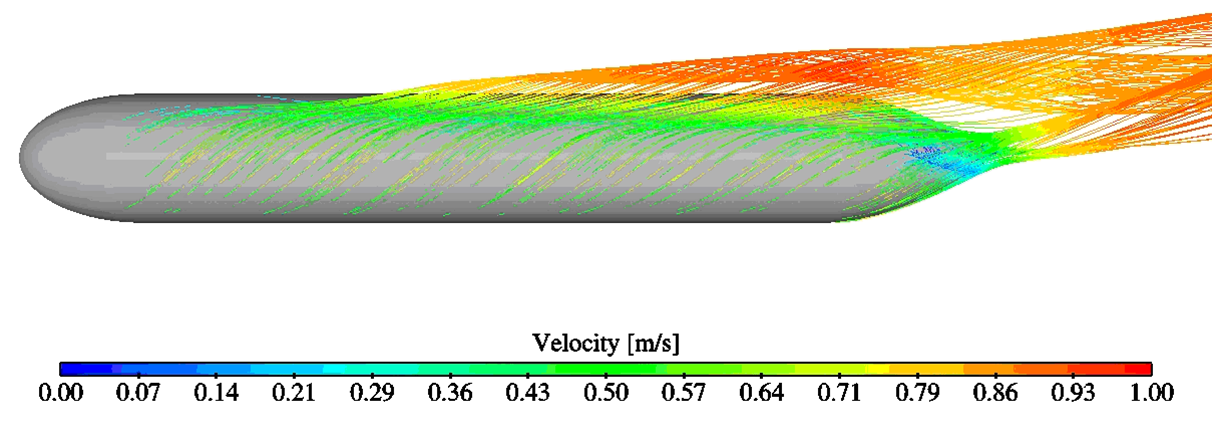
TÍTULO: INVESTIGAÇÃO NUMÉRICA DE ESFORÇOS HIDRODINÂMICOS SOBRE VEÍCULOS AUTÔNOMOS SUBMARINOS
Descrição: Este projeto de pesquisa visa realizar um estudo nas áreas de modelagem hidrodinâmica e otimização de parâmetros geométricos de veículos autônomos submarinos (AUVs), baseado em técnicas de dinâmica dos fluidos computacional, ou CFD. Tal proposição insere-se num contexto de pesquisa na área de manobrabilidade de AUVs que tem caracterizado as atividades de pesquisa do ?Laboratório de Veículos Não Tripulados?, LVNT, da Universidade de São Paulo. Em particular, o plano de pesquisa proposto representa uma continuidade das investigações em estimativa de esforços hidrodinâmicos realizadas no projeto "Desenvolvimento de Veículos Autônomos de Baixo Custo" , financiado pela Fapesp (proc. N. 07/56646-5). A derivação de metodologias para a estimativa de esforços hidrodinâmicos a partir das características geométricas dos veículos tem como uma das aplicações a otimização de formas visando o melhor desempenho e aumento da autonomia do veículo. No caso de AUVs, devido também à falta de um estabelecimento de tais metodologias, há poucos trabalhos que exploram a estimativa de parâmetros hidrodinâmicos na otimização do desempenho do veículo em manobra. Identifica-se, portanto, mais uma área que pode-se beneficiar da pesquisa proposta. Neste projeto, trata-se da estimativa de esforços estáticos de sustentação(variando-se o ângulo de ataque na ausência de velocidades angulares), esforços dinâmicos (oriundos de movimentos rotacionais do veículo), esforços de massa adicional e esforços de arrasto viscoso. Os esforços estáticos e de arrasto viscoso estão sendo validados através de ensaios com hidroplanos e um modelo cativo em tanque de provas. Já as derivadas dinâmicas terão suas estimativas verificadas de acordo com a resposta do AUV Pirajuba, que está sendo desenvolvido no LVNT, em ensaios autopropelidos. Em particular, destaca-se também o desenvolvimento do AUV Pirajuba neste projeto.
Investigadores Principais: Ettore Apolônio de Barros (EPUSP), João Lucas Dozzi Dantas (EPUSP).
Financiador: Fapesp- Auxílio Financeiro. Vigência: 2009-2011
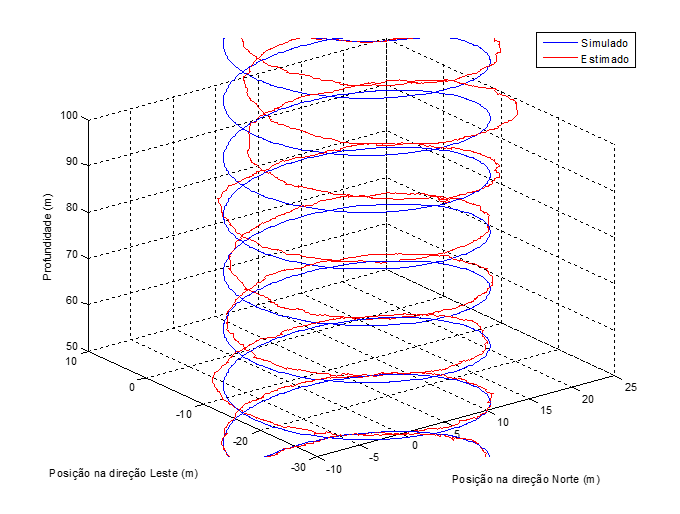
Estimativa de Trajetória: Resultados de Simulação