
Ongoing Projects
TITLE: Development of an Unmanned Hybrid Underwater Vehicle Applied to Environmental Missions and the Offshore Exploration Industry
Description: The main objective of this project is to develop an unmanned vehicle capable of operating in shallow waters, up to 100 m of water depth, both in autonomous and tele-operated modes.
Autonomous Mode: Pre-programmed maneuvers at cruising speed.
Tele-Operated Mode: Addition of a fiber-optic umbilical cable for operation from the surface.
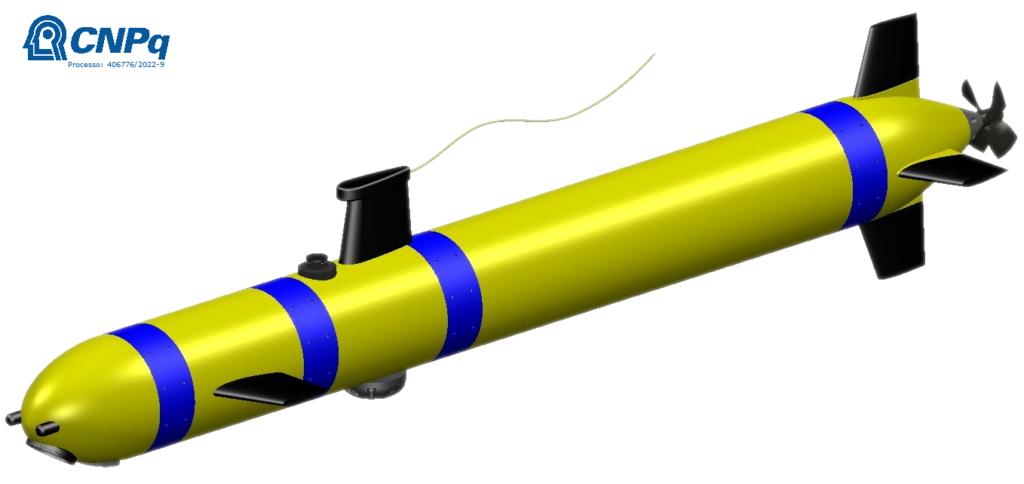
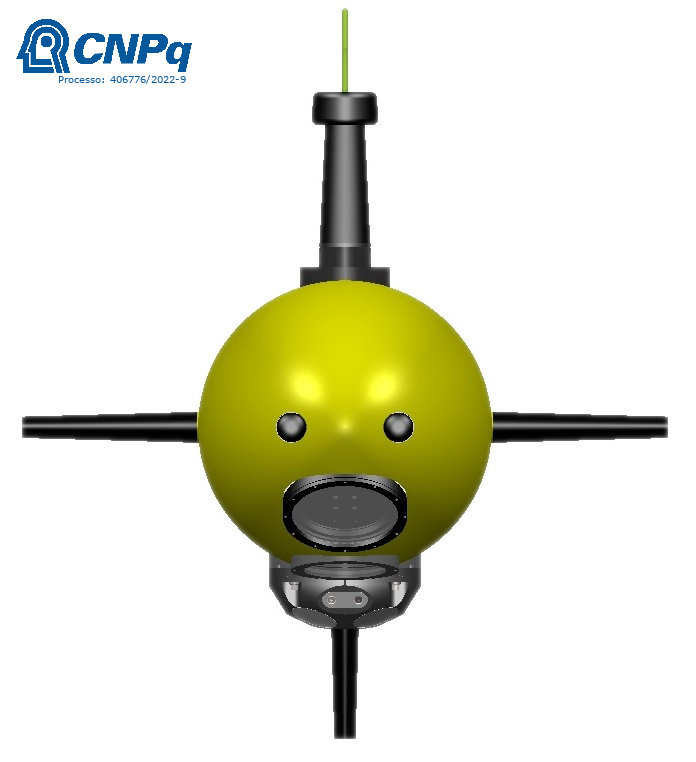
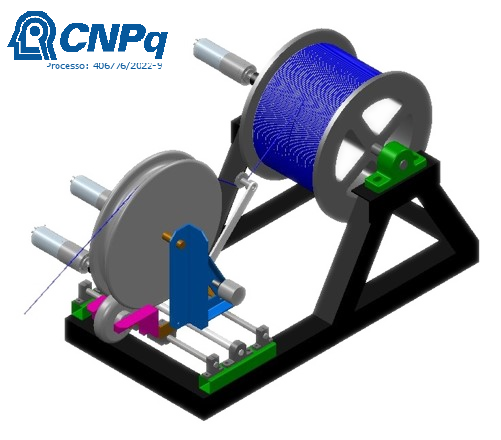
Funding agency: National Council for Scientific and Technological Development (CNPq) – grant 406776/2022-9.
Selected Completed Projects
TITLE: Marinized System for the Inspection of Steel Cables in Mooring Lines of Floating Units
Description: The main objective of this project is the development of a technology and corresponding infrastructure for measuring the integrity of metallic cables in mooring lines. The development of this inspection system is based on the combination of two main components: the “platform”, responsible for moving the assembly along the cable to be inspected, and the “inspection tool”. The platform is responsible for moving the assembly along the cable to be inspected. The inspection tool consists of the “effector”, which is the electromechanical structure attached to the platform and carries an integrated set of electromagnetic transducers and its signal conditioning system, called the “sensor element”. The platform transports the tool to the inspection locations and, once the desired position is reached, the effector positions the sensor element around the metallic cable to be inspected. Both the “platform” and the “inspection tool” are remotely operated by the system user from a vessel on the surface. A modular system is proposed in which the “inspection tool”, the main object of this development, can be adapted to different platform models available on the market. The signals must be conditioned and transmitted through an umbilical cable in order to allow real-time inspection. The project also includes the investigation of adapting this technology for operation at greater depths.
TITLE: DEVELOPMENT OF AN UNDERWATER VEHICLE FOR THE INSPECTION OF HYDROELECTRIC FACILITIES
Description: This project aimed to develop a tele-operated underwater vehicle for the inspection of hydroelectric facilities. The prototype developed was capable of entering the chamber of the generating unit from downstream, while adjacent units remained in operation.
Funding agency: CESP (Companhia Energética de São Paulo). Period: 2011-2014.
TITLE: DEVELOPMENT OF A DYNAMICALLY TUNED GYROSCOPE APPLIED TO SATELLITE ATTITUDE CONTROL SYSTEMS
Description: This research and development project aimed to contribute to the adaptation of a dynamically tuned gyroscope, DTG, developed by the Navy Technological Center in São Paulo (CTMSP), to satellite control systems, as well as to investigate improvements in its performance. A DTG development program was carried out, with implementation under the responsibility of CTMSP and support from LVNT-USP for the numerical and experimental analysis of new prototypes and gyroscope components.
Funding agency: Brazilian Space Agency – Financial Support. Period: 2004-2006.