
Projetos em Andamento
TÍTULO: Desenvolvimento de um Veículo Submarino Híbrido não Tripulado Aplicado a Missões Ambientais e à Indústria de Exploração Offshore
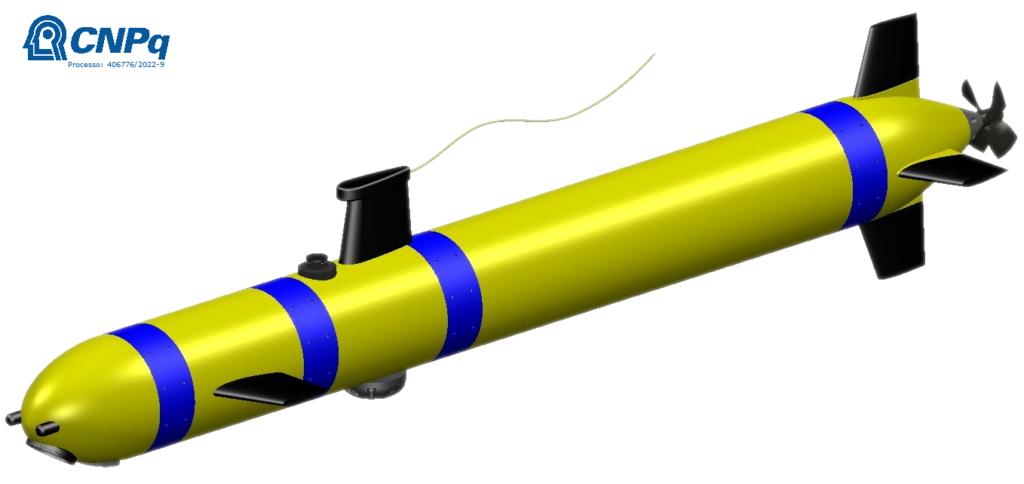
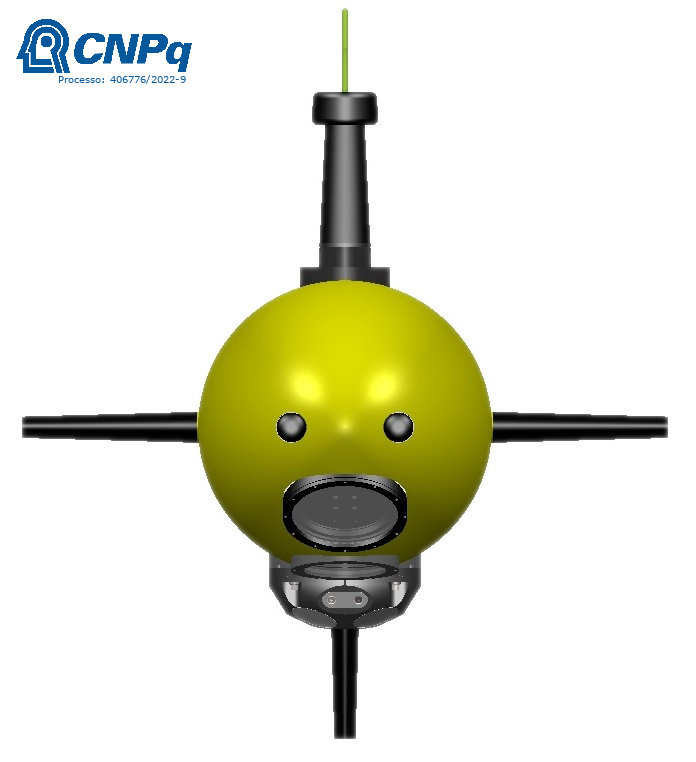
Descrição: Este projeto tem como objetivo principal o desenvolvimento de um Veículo Não Tripulado Capaz de Operar em Águas Rasas (até 100m de lâmina d´água) Tanto no Modo Autônomo como Tele-Operado
Modo Autônomo: Manobras Pré-programadas em Velocidade de Cruzeiro
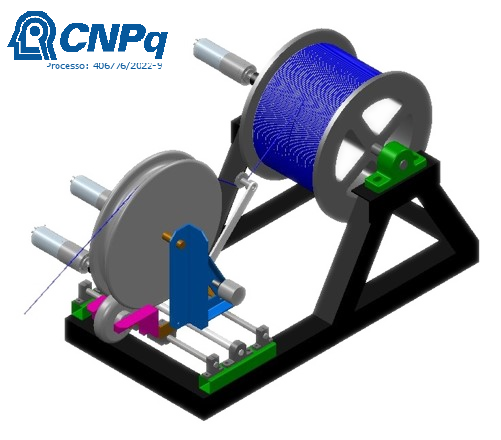
Modo Tele-Operado: Adição de um Cabo Umbilical de Fibra Óptica para Operação a partir da Superfície.
Financiador: Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq) - processo 406776/2022-9.
Alguns Projetos Realizados
TÍTULO: Sistema Marinizado para a Inspeção de Cabos de Aço das Linhas de Ancoragem de Unidades Flutuantes
Descrição: Este projeto tem como objetivo principal o desenvolvimento de uma tecnologia e respectiva infraestrutura para medição da integridade de cabos metálicos de linhas de ancoragem. O desenvolvimento deste sistema de inspeção é baseado na combinação de 2 componentes principais: a "plataforma", responsável pelo deslocamento do conjunto ao longo do cabo a ser inspecionado e a "ferramenta de inspeção". A plataforma é responsável pelo deslocamento do conjunto ao longo do cabo a ser inspecionado. A ferramenta de inspeção é constituída pelo "efetuador", que é a estrutura eletromecânica, anexada à plataforma, e que porta um conjunto integrado de transdutores eletromagnéticos e o seu sistema de condicionamento de sinais, denominado "elemento sensor". A plataforma transporta a ferramenta aos locais de inspeção e constitui o alcançado a posição desejada, o efetuador posiciona o elemento sensor ao redor do cabo metálico a ser inspecionado. Tanto "plataforma" como "ferramenta de inspeção" são remotamente operados pelo usuário do sistema a partir de uma embarcação na superfície. Propõe-se um sistema modular em que a "ferramenta de inspeção", objeto principal deste desenvolvimento, possa ser adaptada a diferentes modelos de plataforma, que podem ser obtidos no mercado. Os sinais devem ser condicionados e transmitidos via cabo umbilical de modo a permitir a inspeção em tempo-real. O projeto prevê também a investigação da adaptação desta tecnologia para maiores profundidades de operação
TÍTULO: DESENVOLVIMENTO DE UM VEÍCULO SUBAQUÁTICO PARA A INSPEÇÃO DE INSTALAÇÕES HIDRELÉTRICAS
Descrição: Este projeto visou o desenvolvimento de um veículo subaquático tele-operado para a inspeção de instalações hidrelétricas. O protótipo desenvolvido foi capaz de adentrar à câmara de da unidade geradora por jusante, com as unidades adjacentes em funcionamento.
Financiador: CESP (Companhia Energética de São Paulo). Vigência: 2011-2014.
TÍTULO: DESENVOLVIMENTO DE UM GIROSCÓPIO SINTONIZADO DINAMICAMENTE APLICADO AO SISTEMA DE CONTROLE DE ATITUDE DE SATÉLITES
Descrição: Este projeto de pesquisa e desenvolvimento visou contribuir para a adaptação de um giroscópio sintonizado dinamicamente, DTG, desenvolvido pelo Centro Tecnológico da Marinha em São Paulo, CTMSP, ao sistema de controle de satélites, bem como, investigar a melhoria de seu desempenho. Foi executado um programa de desenvolvimento de DTGs, cuja implementação ficará a cargo do CTMSP, contando com a assessoria do LVNT-USP para a análise numérica e experimental de novos protótipos e partes integrantes do giroscópio.
Financiador: Agência Espacial Brasileira- Auxílio Financeiro. Vigência: 2004-2006.