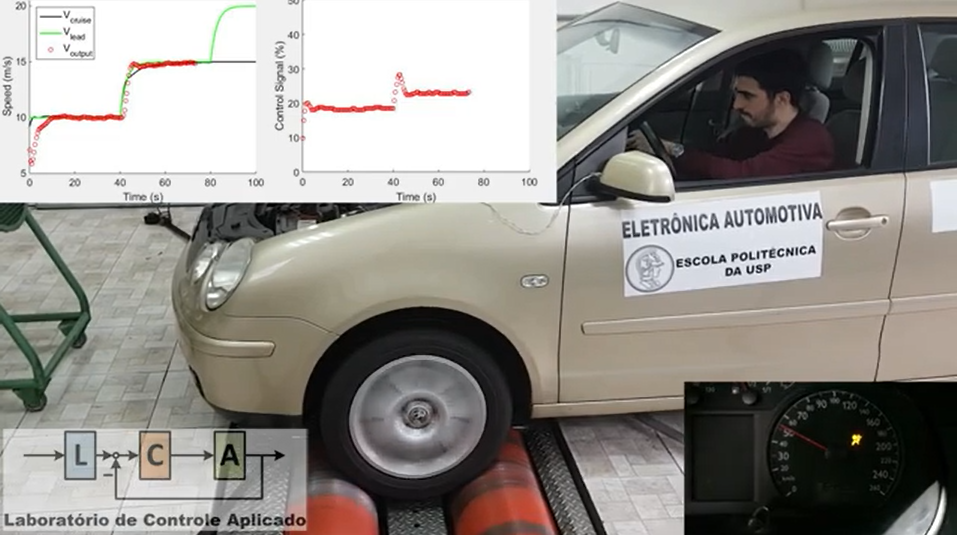
Neste projeto controladores MPC fora utilizados no Controle de Cruzeiro Adaptativo (ACC) de um veículo com ECU customizada. Desenvolveu-se uma ECU para o que se comunica via CAN com a ECU de gerenciamento do motor. O MPC foi embarcado na ECU customizada. Testes práticos foram realizados em um dinamômetro de rolo, em que a distância e a velocidade relativa do carro da frente foram geradas artificialmente.
Duas publicações em periódico foram geradas deste trabalho:
Adaptive Cruise Control with a Customized Electronic Control Unit (https://link.springer.com/article/10.1007/s40313-018-00422-1)
Predictive Adaptive Cruise Control Using a Customized ECU (https://ieeexplore.ieee.org/document/8704211)