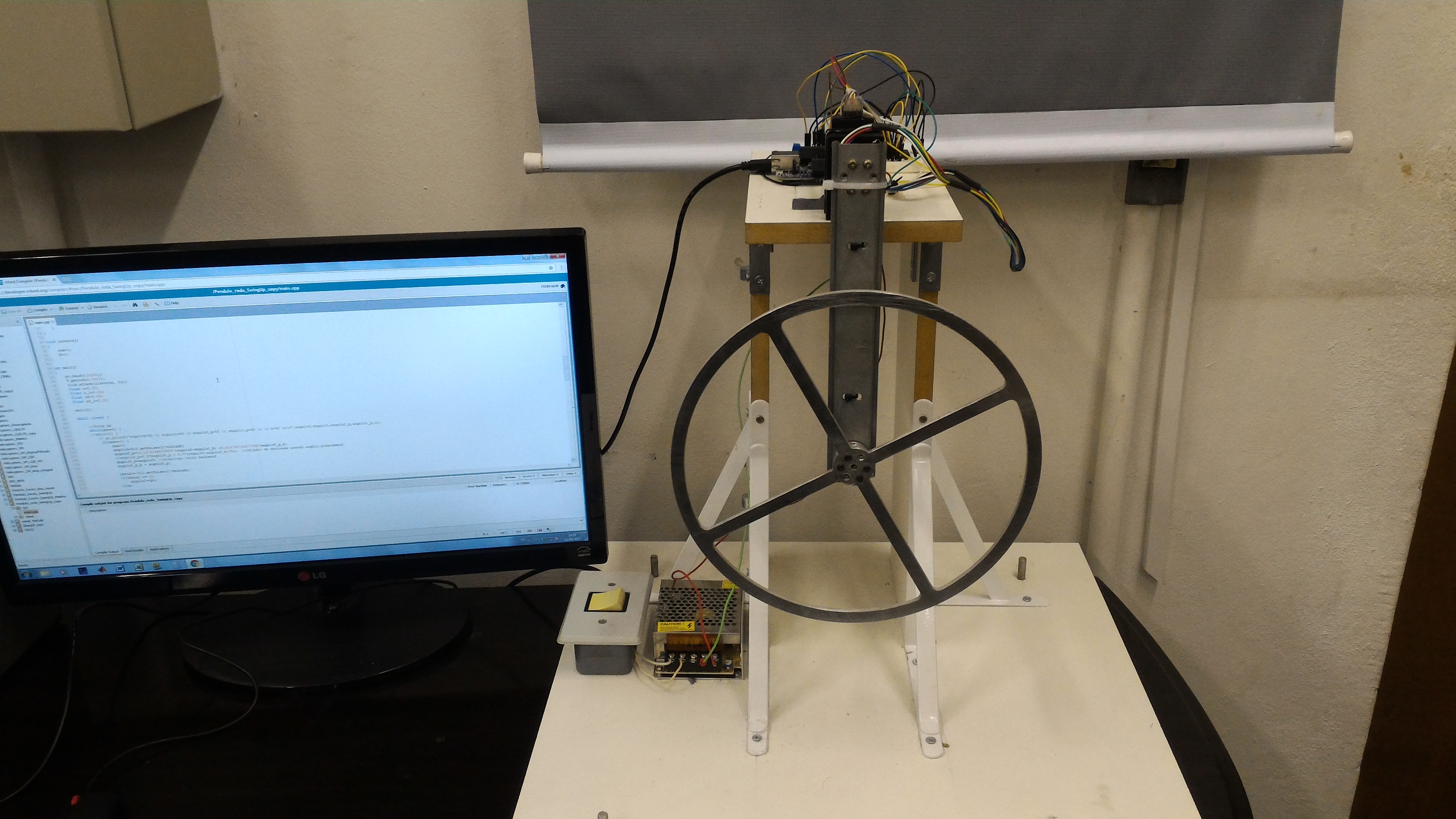
O novo pêndulo invertido desenvolvido no LCA possui como atuador uma roda de reação ligada a um motor de corrente contínua.
O controle foi dividido em duas partes. Inicialmente o sistema é levado ao seu ponto de equilíbrio (algoritmo de Swing-Up), e na vizinhança do ponto de equilíbrio o controle é chaveado para o modo estabilizante utilizando a técnica de controle LQR.
Aplicações de sistemas com roda de reação incluem controle de atitude de satélites e veículos espaciais.