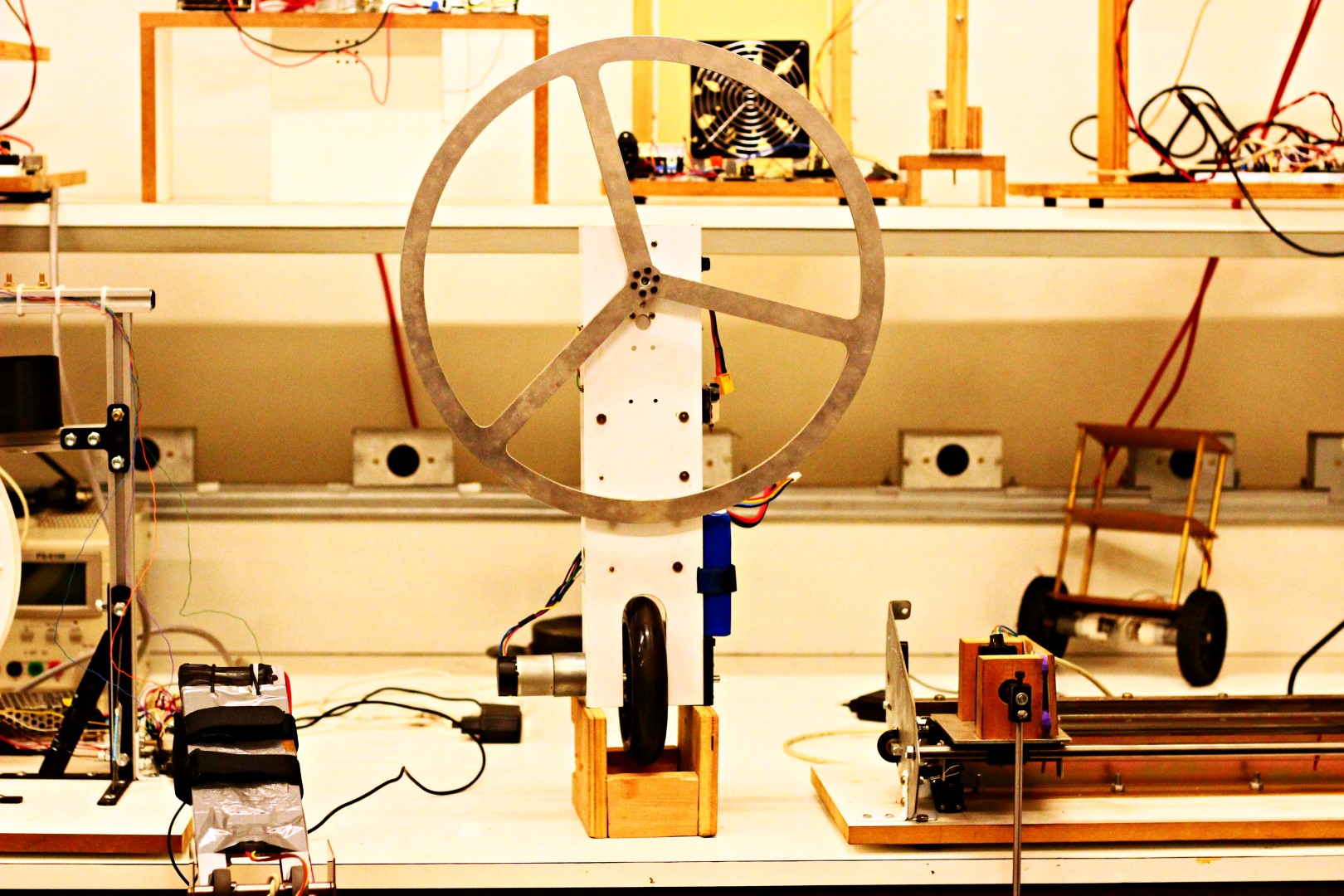
O monociclo foi totalmente desenvolvido no LCA. O sistema possui apenas uma roda para se mover em contato com o solo e uma roda de reação para compensar eventuais desequilíbrios laterias. O monociclo apresenta um grau de dificuldade elevado em termos de modelagem e controle. No vídeo a seguir, um controlador LQR digital foi utilizado. O código é embarcado na plataforma de desenvolvimento NXP K64F.