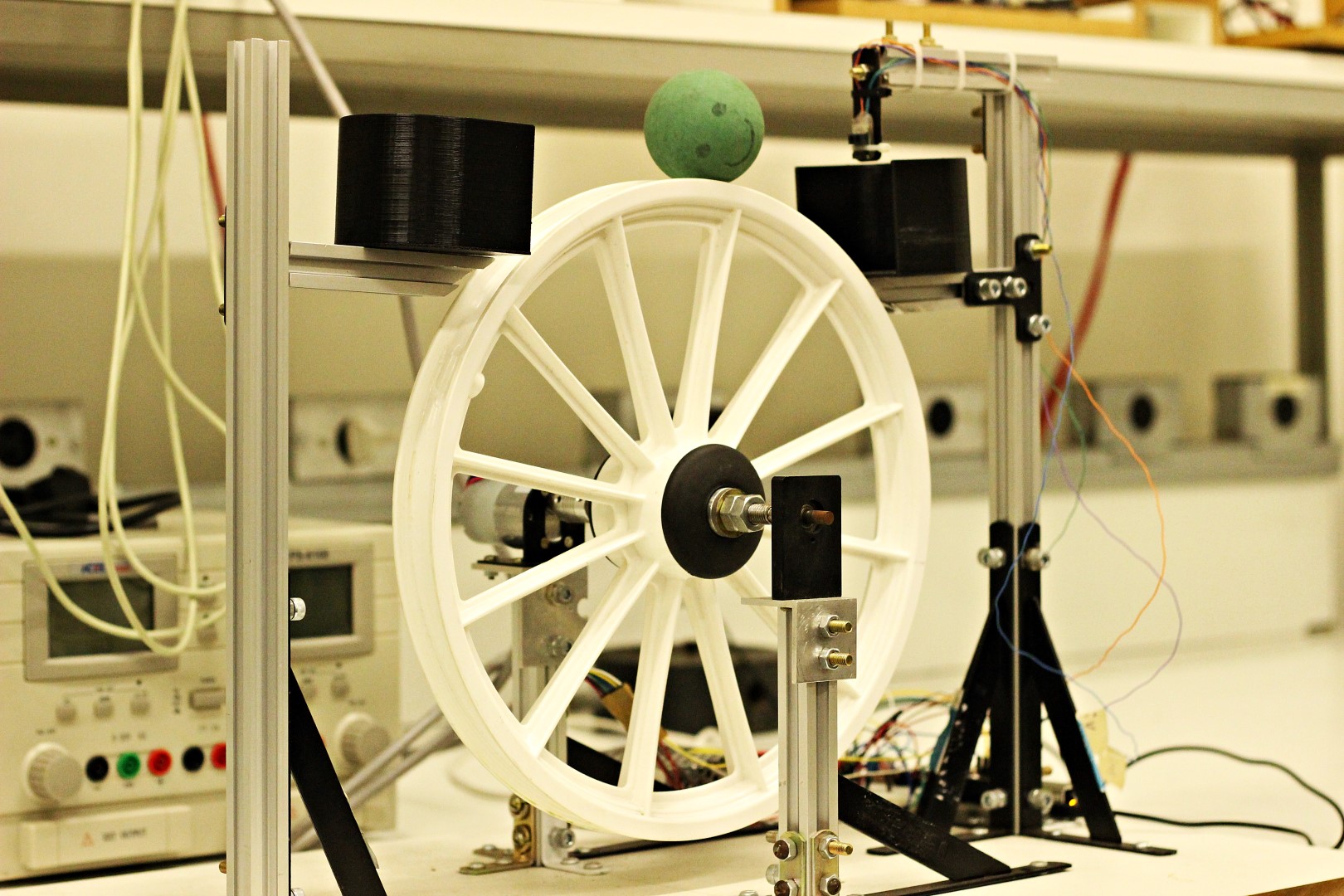
Este sistema foi construído no LCA. No vídeo a seguir, um controlador por modos deslizantes foi utilizado. Um sensor de distância por infravermelho mede a posição da bola. O código é embarcado na plataforma de desenvolvimento NXP K64F.
Este sistema foi construído no LCA. No vídeo a seguir, um controlador por modos deslizantes foi utilizado. Um sensor de distância por infravermelho mede a posição da bola. O código é embarcado na plataforma de desenvolvimento NXP K64F.