Descrição
A técnica de sistemas multicorpos (Multibody System – MBS) permite os engenheiros criar e testar protótipos virtuais de sistemas mecânicos de grande complexidade com facilidade em uma fração do tempo e os custos necessários para a constituição física e teste. A técnica de sistemas multicorpos pode resolver equações de cinemática, estática, quase-estática e dinâmica de sistemas com vários corpos e muitos graus de liberdade. Utilizando a metodologia de multicorpos pode-se obter a solução dinâmica de sistemas com grandes deslocamentos, vínculos não lineares e choque. Um exemplo de sistema multicorpos é o veículo metro-ferroviário.
Objetivo
O LSDV tem a proposta de explorar aspectos teóricos e métodos computacionais aplicados a sistemas multicorpos rígidos e flexíveis, suas aplicações e os procedimentos experimentais utilizados para validar os fundamentos teóricos e modelos elaborados.
Atividades
Realizar pesquisa abordando as questões de novas formulações, algoritmos de solução, a eficiência computacional, análise cinemática e computacional, síntese, os efeitos de flexibilidade, controle, otimização, simulação em tempo real, computação paralela, espaço de trabalho e planejamento de trajetória, contato, choque, confiabilidade e durabilidade . Campos como a dinâmica do veículo, tecnologia aeroespacial, robótica e mecatrônica, dinâmica de máquinas, resistência ao choque, biomecânica, computação gráfica e identificação de sistemas também são examinados quando o assunto é relevante para a dinâmica do sistema multicorpos.
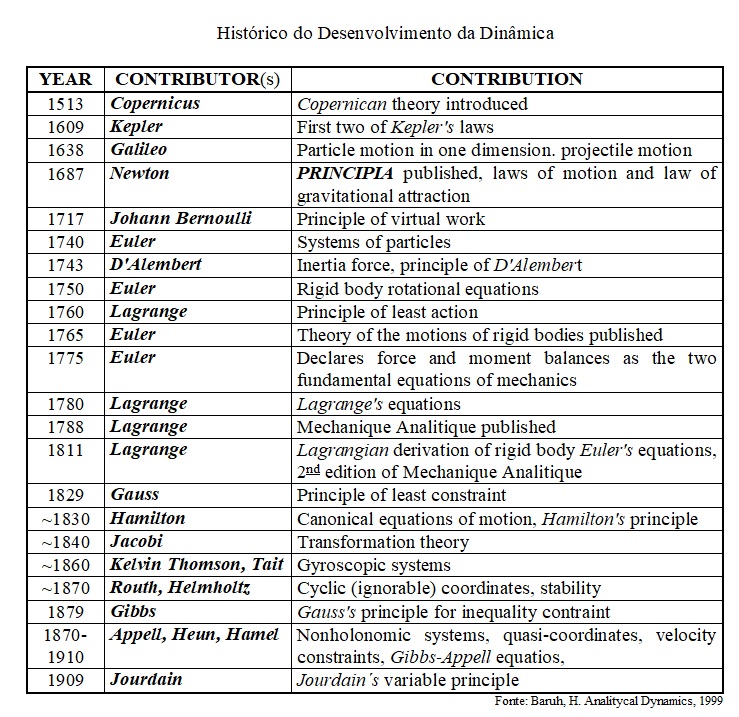
Histórico
O desenvolvimento do conhecimento em dinâmica foi realizado com a contribuição de grandes pesquisadores universalmente reconhecidos. Segue uma cronologia das contribuições de alguns autores e respectiva descrição:
- Sir Isaac NEWTON (1642-1727) Nascido em Lincolnshire Inglaterra, formado em Cambridge (fractais).
- Jean Le Rond D’ALEMBERT (1717-1783) Frances, formou-se na Academia de Ciências de Paris.
- Leonard EULER (1707-1783) Nascido em Basel na Suíça formou-se na Universidade de Basel orientado por Bernoulli
- Joseph Louis LAGRANGE (1736 ~1813). Italiano, estudou na Royal Artillery School em Turim onde nasceu. Desenvolveu o que se conhece como Equações de Lagrange em 1780, na Academia de Ciências de Berlin, como sucessor de Euler na diretoria do Instituto de Matemática e depois foi para Academia de Ciências de Paris onde terminou sua carreira.
- Josiah Willard GIBBS (1839 ~1903). Nascido em Connecticut com doutorado em Yale 1863. Formulou o que é chamado de equações de Gibbs – Appell em 1873.
- Paul Emille APPELL (1855 ~1930) De Strasburgo em 1885 foi membro da Mecânica da Sorbone na França.
- Philip Edward Butrand JOURDAIN (1879 ~1921) Cientista inglês que concebeu o princípio variacional de Jourdain (1909) formado em Cambridge, Inglaterra.
Publicações:
Appell (1925) Sur une forme générale des équations de la dynamique.
Baruh, H. (1999) Analytical Dynamics . Editora McGraw-Hill, 718 p.
Popp K. (2010) Ground Vehicle Dynamic. Editora Springer, 348 p.
Udwadia, Kalaba (1998) The Explicit Gibbs-Appell Equation and Generalized Inverse Forms
Baruh, H. (2000) Another Look at the Describing Equations of Dynamics.
Wang, Pao (2003) Jourdain’s variational equation and Appell’s equation of motion for nonholonomic dynamic systems.
Fornecedor de Software de Multicorpos:
Congressos e Conferencias:
Veja os eventos, congressos e conferencias de dinâmica em:
The International Association for Vehicle System Dynamics